
Shoe tying robot
This project was from my undergraduate senior design class, in which I led a group of five students in building a robotic system capable of tying a shoe. The project was proposed as being analogous to bomb-defusing tasks, in which remote operators use teleoperation to dexterously control robots for carefully disarming bombs. We developed both an end-to-end teleoperation system and a set of interchangeable mechanical graspers. We were one of the three out of approximately a dozen mechanical engineering design teams to be awarded a Design Award for “showing the most creativity and originality in their designs”.
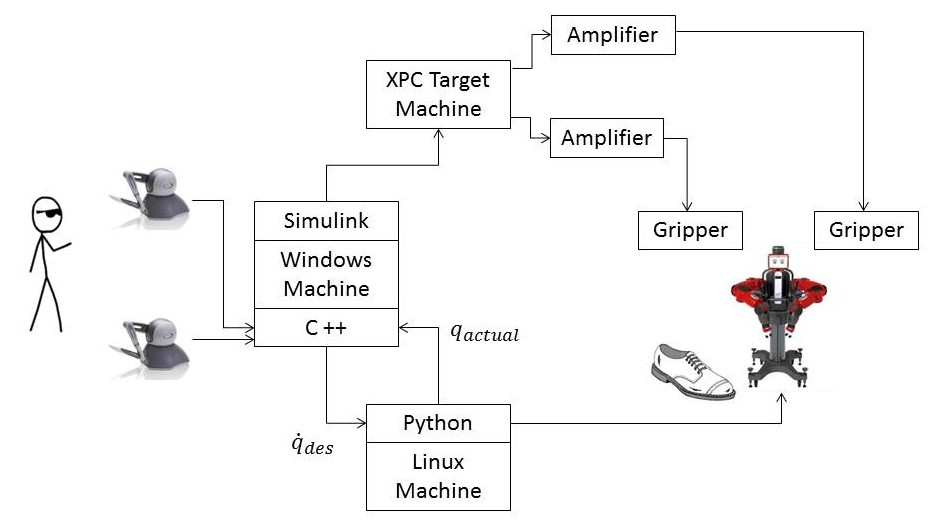
Teleoperation: This video shows the teleoperation of a two-armed 7-DOF robot using two Phantom Omni input devices:
Shoe tying: This is a demonstration of successful shoe tying using our graspers and teleoperation scheme: