
Needlescopic surgical wrists
This was a project that I worked on as an undergraduate researcher with Prof. Webster at Vanderbilt. His lab had developed an exciting technology called “concentric tube robots”, in which nested, pre-curved superelastic nitinol tubes are rotated and translated to access difficult-to-reach parts of the body in minimally invasive surgery, such as the skull base and the lungs. My contribution, conducted under the direction of Phil Swaney, was to develop a simple flexible wrist to enhance the distal dexterity of these devices.
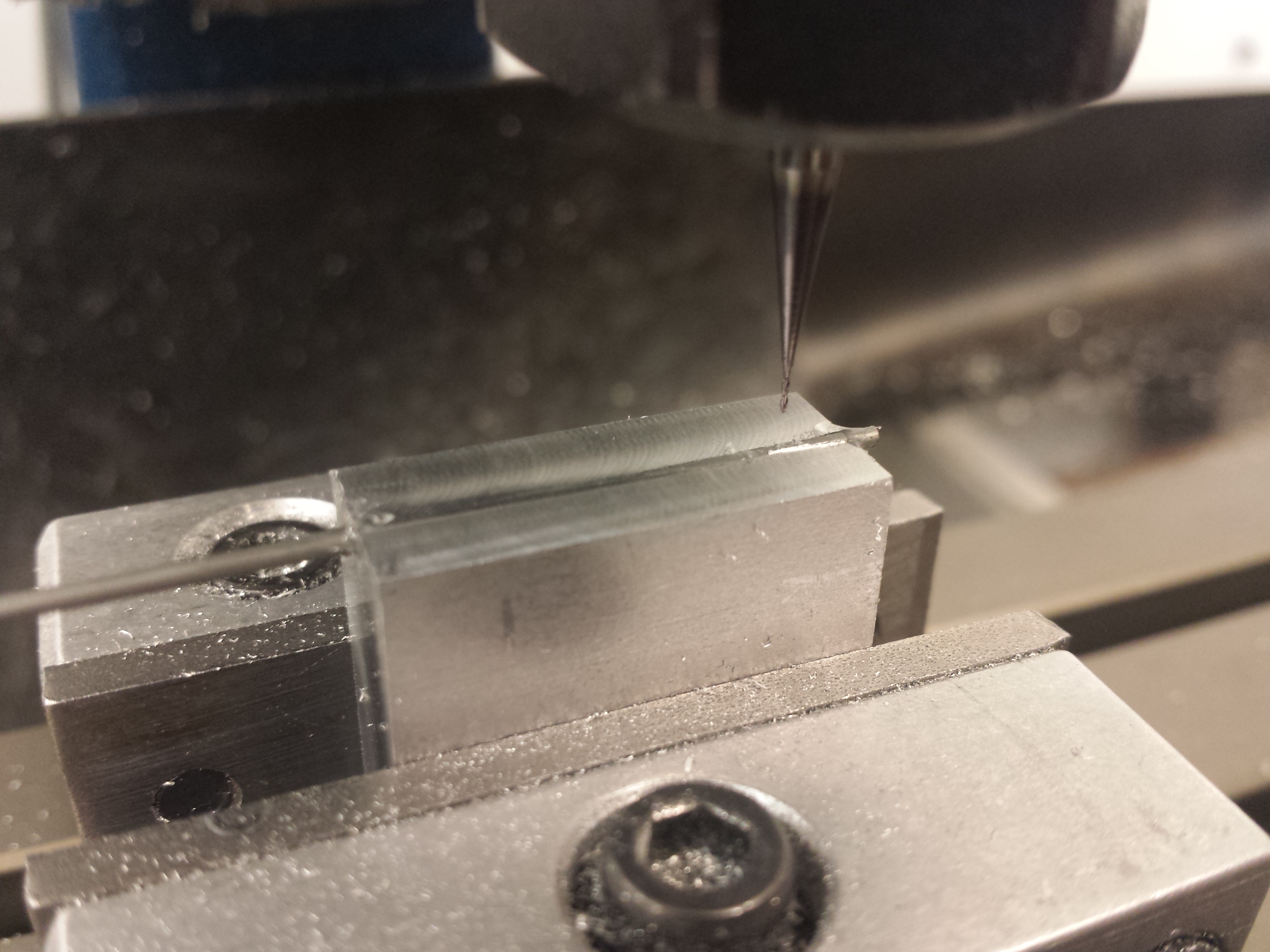
My approach was to use a micro CNC to carefully machine slots in the nitinol tube, which allowed for localized bending using a single pull wire. I also developed a simple statics-based model for predicting the wrist’s kinematics.
Teleoperated motion: This video shows the macroscopic motion of the concentric tube robot combined with the distal bending motion of the wrist:
Skull base access demonstration: This demonstration shows the value of the wrist in a simulated pituitary resection procedure; the wrist, with a curette attached, gives the user greater dexterity to manipulate the simulated diseased tissue: